集团有限公司")
- 1 喧喧客户端的下载
-
2. 喧喧客户端的基本使用
- 2.1. 喧喧客户端的用户和设置
- 2.2. 喧喧客户端的通讯录
- 2.3. 喧喧客户端的聊天会话
- 2.4. 喧喧客户端的扩展应用
-
2.5. 喧喧客户端的会议功能
- 2.5.1. 音视频会议基础版(7.1及以下版本)
-
2.5.2. 音视频会议增强版(7.2-7.3版本)
- 2.5.2.1 一对一音视频会议
- 2.5.2.2 群组音视频会议
- 2.5.2.3 独立发起音视频会议入口
- 2.5.2.4 分享音视频会议到会话
- 2.5.2.5 预约会议
- 2.5.2.6 音视频会议应用
- 2.5.3. 音视频会议增强版(9.0及以上版本)
机器人指令会话功能
- 2022-12-21 10:49:58
- 苏萌
- 6993
- 最后编辑:苏萌 于 2023-03-15 10:21:31
- 分享链接
一、功能简介
新版本推出的小喧喧机器人是一种自动化程序,可以向你自动推送消息,并实现简单的命令交互。
机器人指令均支持中英双语种识别,并提供灵活输入方式,满足您的各类指令习惯,新手、非研发人员也可迅速上手。
二、操作流程
1、消息提醒
升级后原消息通知将会放在机器人会话中,默认会包含我们内置的通知信息,后续您可以配置应用选择将希望收到的实时信息放在机器人中。例如,若您配置禅道作为后台,禅道的相关通知会出现在机器人会话中。

2、帮助指令
初步使用可以尝试使用“帮助”指令发送,机器人会返回不同分类下的指令格式、说明及权限,帮助您快速入门。

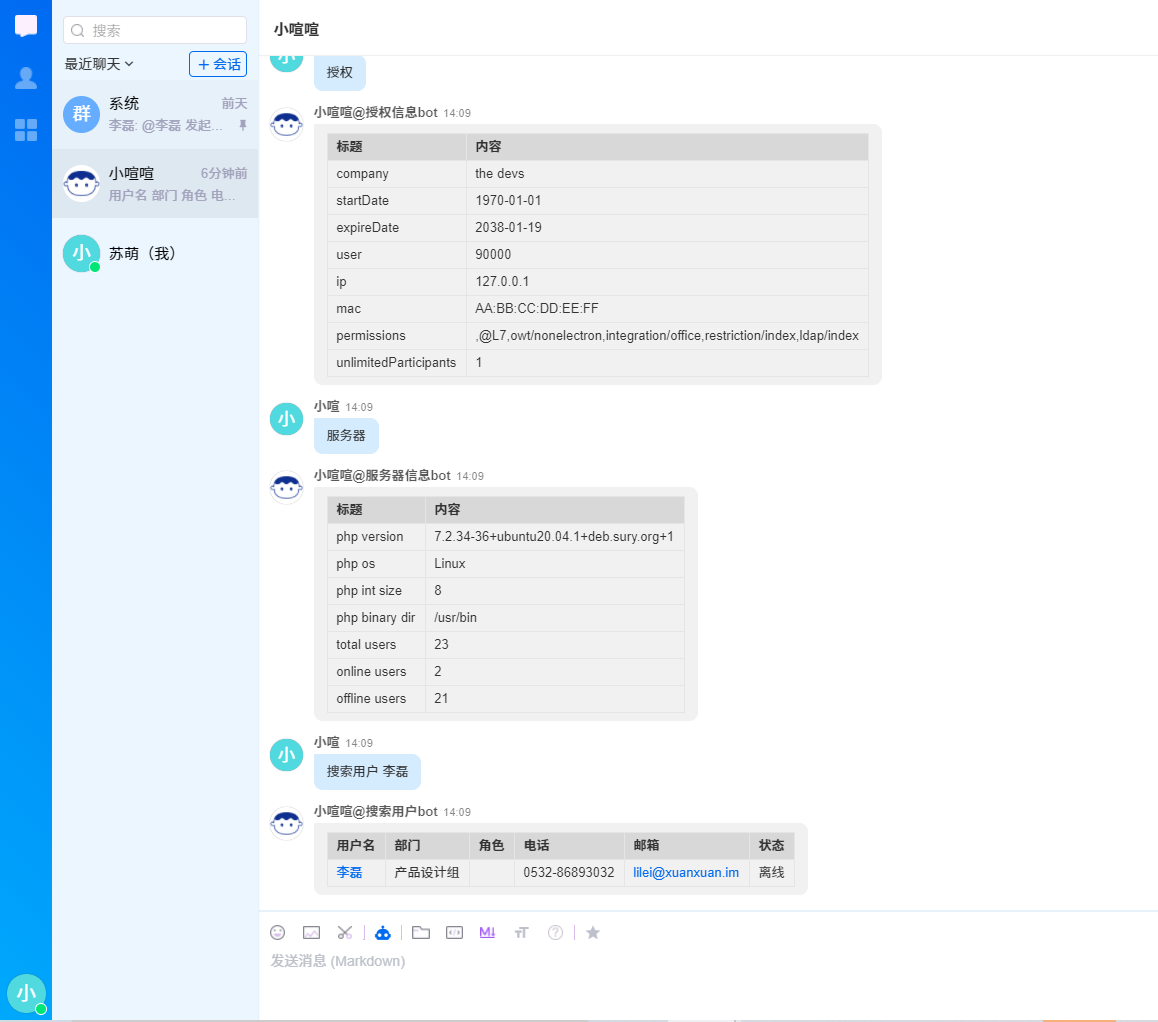
3、内置指令
内置指令是指您无需配置其他应用,在喧喧可以实现的基础命令操作,分为全局指令及系统指令。
全局指令是对于机器人的全局控住,涉及到帮助、应用相关操作。
系统指令是对于配置信息的查看,常用于超级管理员查看服务信息等。
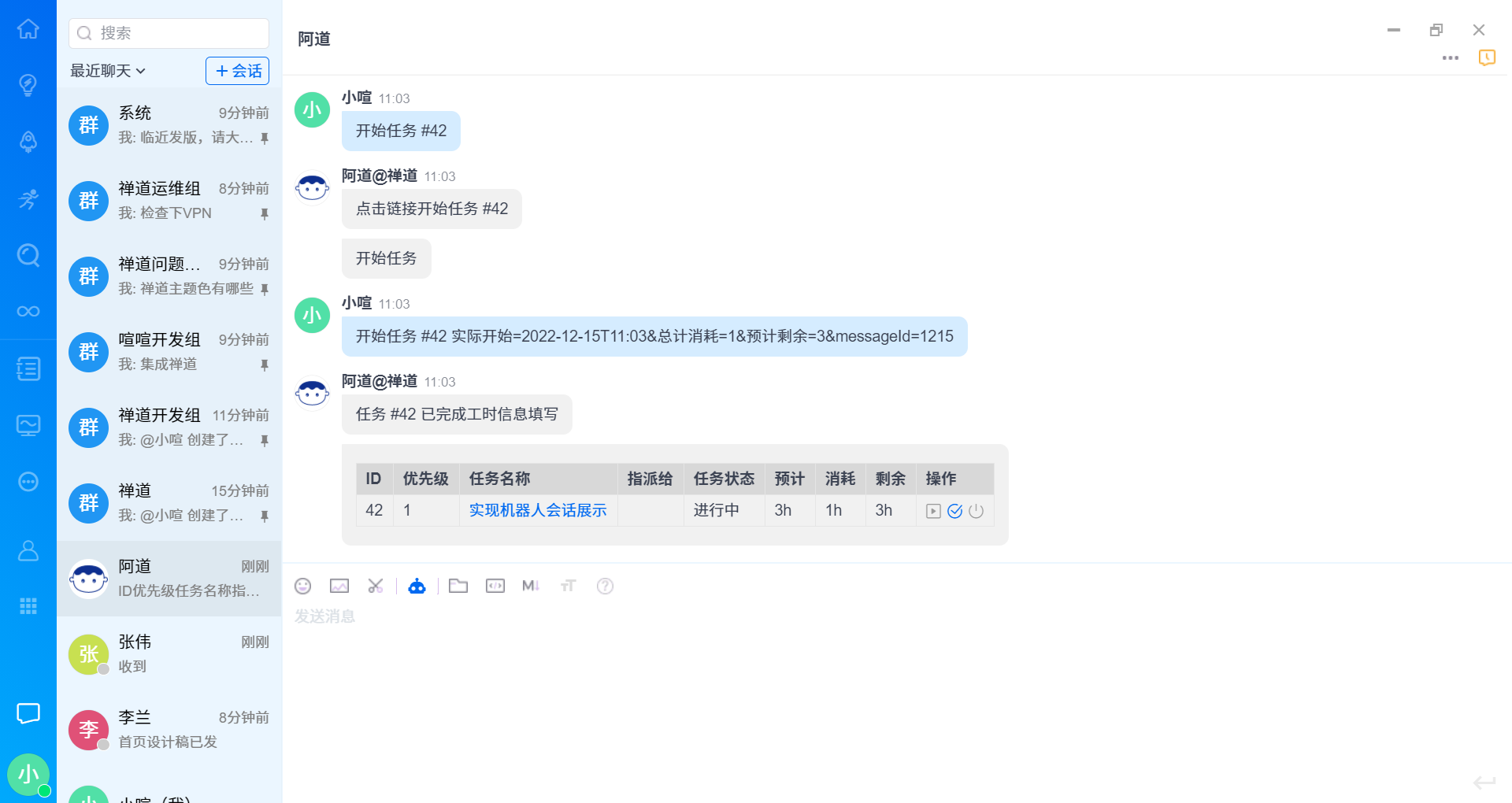
4、禅道相关指令
若您使用禅道作为后台配置,我们支持通过指令对禅道任务相关控制,实现开展高效办公。
首先需要输入“禅道”进入应用下,指令支持对禅道中任务进行查询及操作。
查询任务指令格式为:查看 任务 条件值1 条件值2 条件值n……
我们提供丰富的别名处理,您可以按照习惯将“查看”替换为“搜索”、“查询”或“筛选”。
筛选条件支持按照ID、状态、指派人、优先级、名称过滤,同一过滤属性下多值采用“,”分割,不同过滤属性使用空格分割

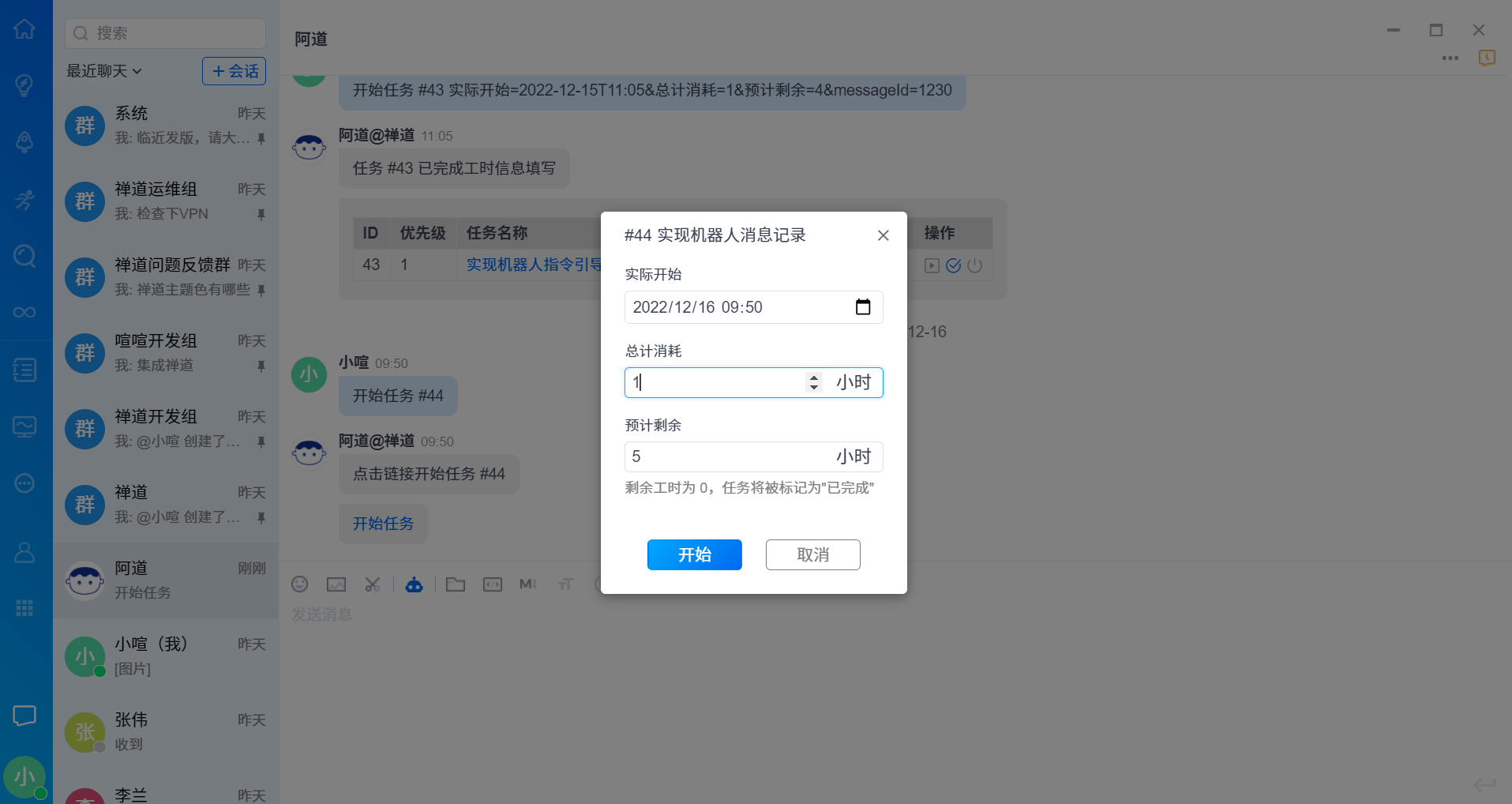
您可以对查询到的任务进行操作,目前支持开始任务、完成任务、关闭任务,点击查询结果列表中的对应按钮即可实现
您也可以通过输入操作指令格式实现任务操作,指令格式为:操作动作(开始、完成、关闭) 任务 #ID。
指令实现逻辑与禅道相同,在禅道中会有记录相关操作,需要填写工时记录等信息。
三、机器人应用开发
机器人具有很高的可定制性,您可以开发属于自己的机器人应用,详情请见 《机器人应用开发》手册











 联系我们
联系我们
 社群交流
社群交流

微信公众号
QQ群


