集团有限公司")
智驾世界模型大战:小鹏华为互怼,谁能定义智能驾驶新范式?
2025年8月的智驾圈,一场关于“世界模型”的争论悄然爆发。
先是小鹏汽车董事长何小鹏在P7发布会后“放话”:“中国真正做出VLA(视觉-语言-行为大模型)的,只有我们一家。”紧接着,华为智能汽车解决方案BU CEO靳玉志公开表态:“我们不会走向VLA路径,这看似取巧,实则不是真正自动驾驶的路。”
这场由技术路线引发的争执,不仅撕开了智能驾驶行业“概念混战”的遮羞布,更折射出车企间对“如何定义未来智能驾驶”的深层博弈。
一、概念迷雾:VLA、WM、WEWA,到底在争什么?
在智驾圈,“世界模型”(World Model, WM)早已不是新鲜词。但近期因小鹏、华为等头部企业的“隔空对话”,这个本就晦涩的技术概念,更添了几分混乱。
1. 从端到端到VLA:技术进化的“必经之路”?
当前主流智驾方案是“端到端+VLM(视觉-语言模型)”,即通过视觉传感器输入数据,经语言模型处理后生成驾驶决策。但随着数据量激增和场景复杂度提升,这种“两段式”方案的局限性逐渐显现—— 感知与决策的割裂。
VLA(视觉-语言-行为大模型)正是为解决这一问题而生。它在端到端+VLM基础上,将“行为生成”环节深度融入模型,理论上能实现“从感知到决策”的全链路闭环。简单来说,VLA更像一个“会思考的驾驶大脑”,能像人类一样“观察-理解-行动”。
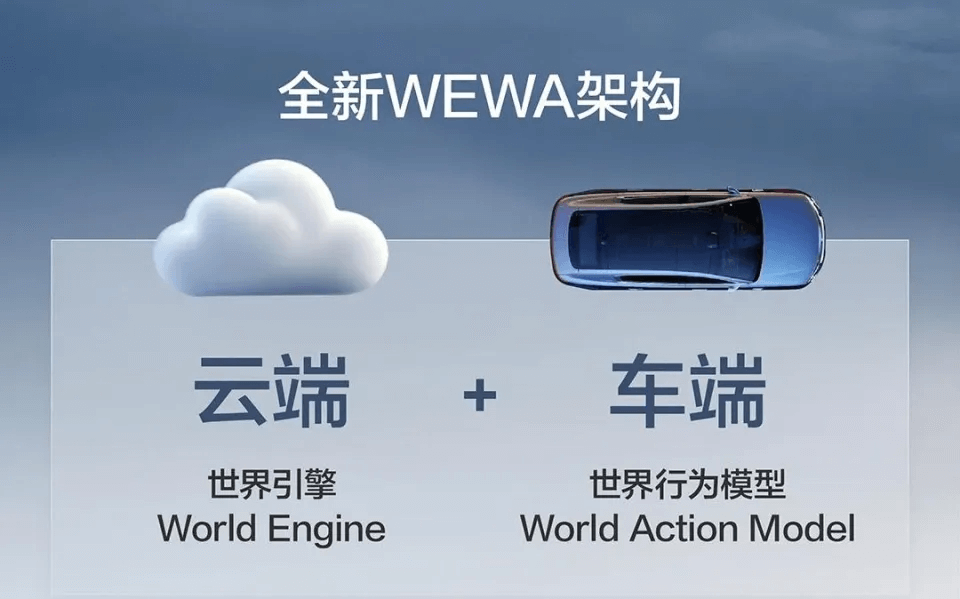
但华为对VLA的否定,揭开了另一条技术路线: WEWA(世界引擎+世界行为模型)。华为认为,语言(Language)是冗余环节,应直接通过视觉(Vision)信息输入控车。其逻辑类似“跳过翻译,直接对话”——用视觉感知构建“世界引擎”(云端训练),再通过车端“行为模型”(轻量化部署)直接生成驾驶动作,省去语言转换的损耗。
2. 小鹏的“真VLA”与理想的“MindVLA”:谁在“挂羊头卖狗肉”?
在小鹏看来,VLA的核心是“车端强算力+全链路闭环”。其即将量产的小鹏P7,搭载三颗图灵芯片,并计划9月通过OTA上线VLA。小鹏自动驾驶副总裁李力耘强调:“真正的VLA需要车端大模型支撑,参数量不够的‘嫁接式VLA’都是伪概念。”
而理想此前宣传的“MindVLA”,则被小鹏视为“营销话术”。理想的MindVLA本质是“云端基座模型+车端VLM”的外挂模式——车端用22亿参数的VLM处理基础感知,云端用更大模型完成复杂决策,再通过“仿真训练+场景验证”优化系统。这种“车端轻量、云端补能”的方案,被小鹏批评为“参数量不足,无法实现真正涌现”。
3. 蔚来的“世界引擎”与元戎的“VLA下限”:技术路线的多样性
并非所有车企都站在小鹏或华为的阵营。蔚来在2024年NIO IN上发布的“世界模型(NWM)”,试图一步到位:通过车端生成式模型直接整合“感知-决策-控制”,跳过语言环节。其逻辑类似“用AI生成轨迹规划”,但受限于车端算力(需80亿参数模型),直到2025年5月才全量推送,被业内调侃“革命尚未成功”。
元戎启行CEO周光则力挺VLA:“语音控车只是基础,真正的核心是思维链(CoT)和长时序推理。”在他看来,VLA的“下限已超过端到端的上限”,其优势在于能处理更复杂的“长链条决策”(如连续变道、应对突发障碍物)。
二、争议本质:技术理想与商业现实的碰撞
这场“概念大战”的背后,是智能驾驶行业从“技术验证”向“规模落地”转型的焦虑。
1. 技术理想:谁都想定义“自动驾驶的终极形态”
小鹏坚持车端VLA,是因为其相信“大模型必须在车端强算力支撑下才能涌现智能”;华为押注WEWA,是希望通过“去语言化”降低车端算力消耗(其WA模型车端算力负担仅2B,相当于手机芯片水平);蔚来追求“生成式世界模型”,则是想实现“无需人工标注”的全场景覆盖。
这些技术路线的分歧,本质是对“智能驾驶终极形态”的不同想象——是“车端超级大脑”,还是“云端-车端协同”?是“依赖语言交互”,还是“纯视觉决策”?
2. 商业现实:产品收益才是最终裁判
尽管各车企争得不可开交,地平线相关负责人却点破关键:“所有新技术,最终要看产品收益。万变不离其宗,都是端到端模型。带不来收益,再花哨的概念都是空谈。”
这一观点戳中了行业的痛点。智能驾驶的研发投入以百亿计,车企需要的不是“技术标签”,而是“用户愿意买单的功能”。例如,华为WEWA的优势在于“车端算力消耗降低75%”,这意味着硬件成本可大幅下降,更易普及;小鹏VLA若能实现“车位到车位全场景辅助驾驶”,则能直接提升用户付费意愿;蔚来的NWM若能解决“生成式模型的实时优化”问题,或可在高端市场建立壁垒。
3. 行业规律:前50%收益易,后50%难如登天
另一个被忽视的现实是,智能驾驶的技术迭代遵循“收益递减”规律——前50%的功能(如高速NOA、自动泊车)相对容易实现,后50%的“长尾场景”(如暴雨天窄路会车、无保护左转)才是真正的考验。
无论是VLA、WM还是WEWA,最终都需回答一个问题: 能否在“后50%”的长尾场景中稳定表现? 若不能,再先进的技术路线也只是“空中楼阁”。
三、结语:概念终会褪色,用户需求才是永恒
从“端到端”到“VLA”,从“WM”到“WEWA”,智能驾驶的技术概念更迭如潮。但无论车企如何包装“新范式”,用户的需求始终清晰: 更安全、更可靠、更省心的驾驶体验。
小鹏与华为的“互怼”、理想与蔚来的“路线之争”,本质是行业从“野蛮生长”向“技术沉淀”转型的缩影。当概念的泡沫逐渐消散,最终留下的,将是那些能用技术解决真实场景问题、用产品打动用户的企业。
或许,评判“世界模型大战”胜负的标准很简单: 当你在暴雨天的窄路会车时,你的车能否像老司机一样从容应对? 到那时,所有的技术路线都将失去意义——用户只会记住,那辆车“很聪明”。

 16
16










 联系我们
联系我们
 社群交流
社群交流

微信公众号
QQ群


